EtherCAT®
EtherCAT® is a very flexible real-time Ethernet protocol for industrial applications described in the IEC 61158 standard. Data exchange is based on the 'processing on the fly' principle: This means that the telegram passes through each slave device and the corresponding device takes its data. As a result, there is only a minimal delay. The data for the master are inserted into the telegram in the same way. This makes EtherCAT an excellent solution for Ethernet-based industrial control systems with many decentralized I/Os and/or cycle times of less than 100 µs.
Development Services
esd electronics (esd) has been developing EtherCAT-Hardware and Software solutions since 2008. We offer standard products like EtherCAT Master and EtherCAT Workbench as well as customer specific solutions. As an active member of the EtherCAT Technology Group (ETG) (www.ethercat.org) we offer engineering services for all aspects of this technology.
Training and Workshops
Since 2008 esd has been conducting workshops on EtherCAT technology and supporting customers in the development of optimized EtherCAT hardware or software products. Training courses can be held at esd headquarters in Hanover or at the customer's site. The type, depth and duration of the measure is determined by the customer together with esd, taking into account the requirements of his project.

EtherCAT Technology
- Based on 100 MBit/s standard Ethernet (100BASE-TX or 100BASE-FX) without additional hubs or switches
- Up to 65535 devices with a maximum line length of 100 m between two devices
- Supports almost all topologies (line, tree, star, ....)
- Hardware-based mechanisms guarantee data consistency in the slave devices
- Hardware-based device synchronization (distributed clocks) with a jitter of less than 1 µs
- Optional cable redundancy through a transitionless switching in case of a single device fault or cable break enables a very cost-effective improvement of system availability.
- Definition of higher protocols: CAN application protocol over EtherCAT (CoE), Ethernet over EtherCAT (EoE), servo drive over EtherCAT (SoE) and file access over EtherCAT (FoE)
- For improved interoperability a device profile is available
EtherCAT Implementation
- An EtherCAT slave device requires specific hardware, which is available as stand-alone EtherCAT controller, FPGA-based IP core or microcontroller with built-in EtherCAT support.
- An EtherCAT master does not require special interface hardware. It can be implemented based on a standard network controller.
Tutorials
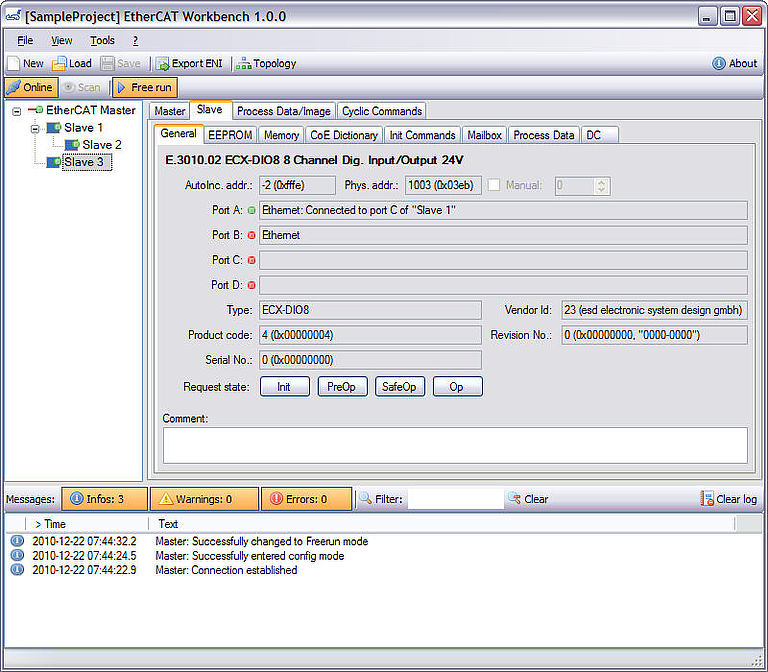
esd EtherCAT Workbench Quickstart

To protect your personal data, your connection to the video streaming provider has been blocked. Click to unblock the video streaming provider. By loading the video you accept the video streaming provider’s privacy policy. More information about the video streaming provider’s privacy policy can be found here: Google - Privacy & Terms
esd CAN-EtherCAT Gateway Quickstart
To protect your personal data, your connection to the video streaming provider has been blocked. Click to unblock the video streaming provider. By loading the video you accept the video streaming provider’s privacy policy. More information about the video streaming provider’s privacy policy can be found here: Google - Privacy & Terms