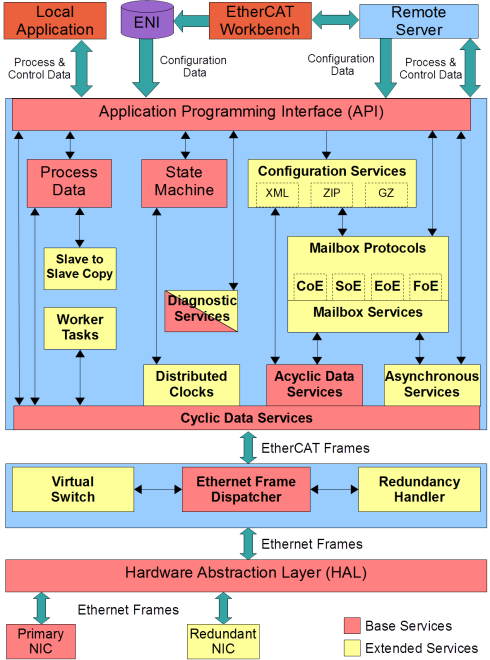
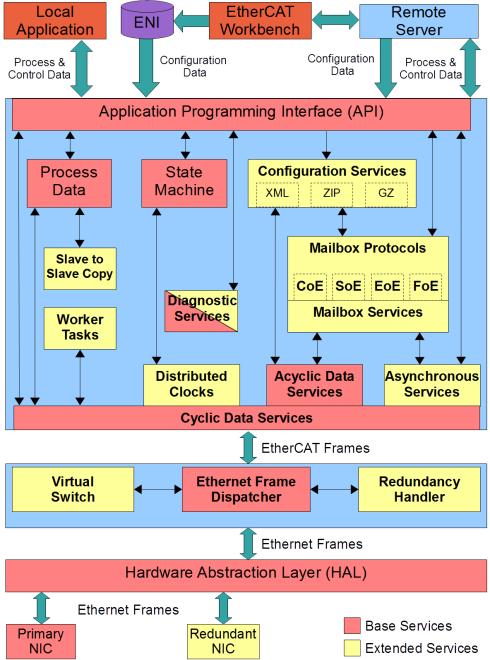
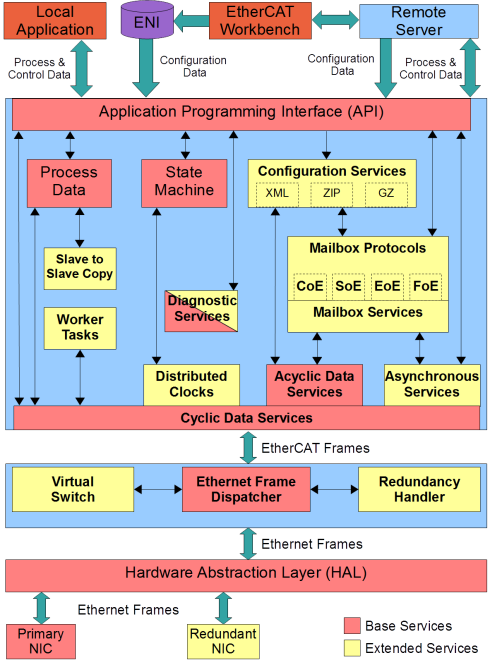
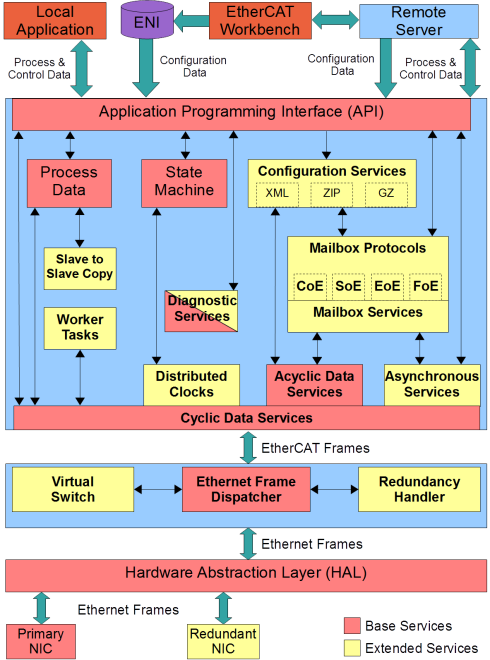
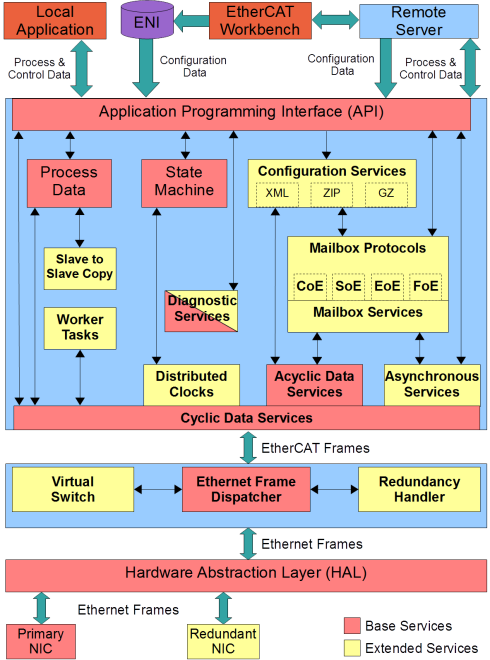
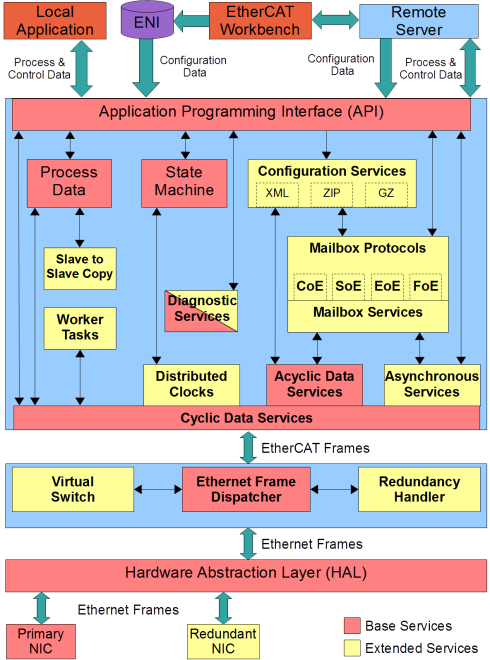
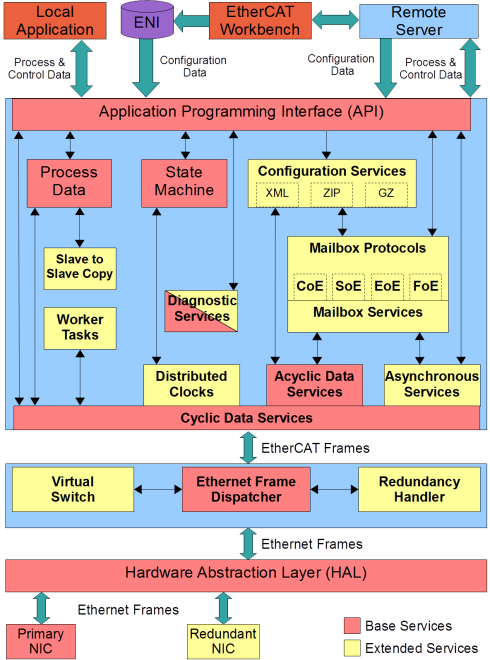
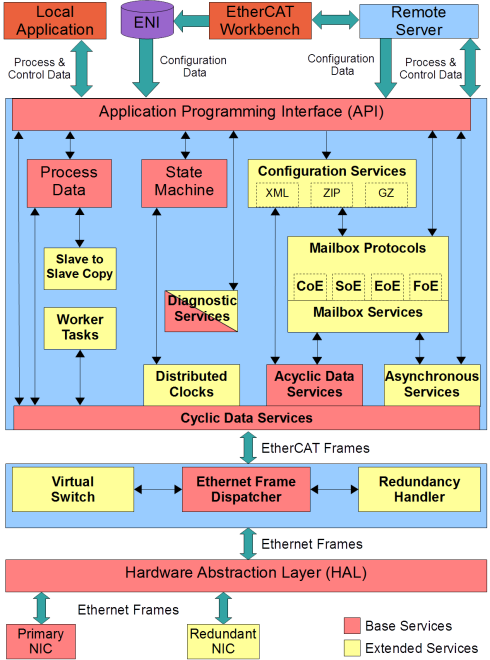
Versatile EtherCAT Master Stack
- Configuration and management of EtherCAT networks
- Cyclic exchange of process data
- Interface between application and EtherCAT Master Stack forms a sophisticated API, identical for all operating systems
- Detailed diagnostic and profiling functions included
- Adaptation for the most common (real-time) operating systems available from stock
High Performance and Reliability
- Written in ANSI-C with a view to high performance, low resource commitment and good scalability
- Core components of the stack software are independent of operating system and CPU architecture
- EtherCAT Master Class A according to ETG.1500
Mailbox based Communication
- CAN application protocol over EtherCAT (CoE)
- Ethernet over EtherCAT (EoE)
- File over EtherCAT (FoE)
- Servo Drive over EtherCAT (SoE)
esd electronics is a member of the EtherCAT Technology Group (ETG).
| Operating System | CPU Architecture |
|---|---|
| VxWorks (5.4.x / 5.5.x / 6.x) | x86 / PPC |
| QNX 6.5.x / 6.6.x | x86 / PPC / ARM |
| QNX 7.x | x86 / x86_64 / ARM |
| RTX 2009 / 2011 / 2012 | x86 |
| RTX64 2014 | x64 |
| OS-9 5.2 | PPC |
| Linux | x86 / x86_64 / PPC / ARM |
| Windows XP / Vista / 7 / 8 / 10 | x86 / x86_64 |

Do you have special requirements regarding the product?
We are happy to provide you with a customer-specific option or adjustment to our products when purchasing appropiate quantities. Please contact our sales team for detailed information.

With the help of the button "Add to watchlist" you can save articles on your watchlist.
Afterwards, you can request your saved watch list as a quotation via a contact form.
Software
EtherCAT Master Stack Operating system: Windows CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- Windows 7/8/10/11
- EtherCAT

EtherCAT Master Stack Operating system: Linux CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- Linux
- EtherCAT

EtherCAT Master Stack Operating system: Linux CPU architecture: PowerPC Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- Linux
- EtherCAT

EtherCAT Master Stack Operating system: Linux CPU architecture: ARM Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- Linux
- EtherCAT

EtherCAT Master Stack Operating system: QNX 6.x CPU architecture: PowerPC Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- QNX6/7
- EtherCAT

EtherCAT Master Stack Operating system: QNX 6.x CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- QNX6/7
- EtherCAT
EtherCAT Master Stack Operating system: QNX 6.x CPU architecture: ARM Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- QNX6/7
- EtherCAT

EtherCAT Master Stack Operating system: QNX 7.x (32/64 Bit) CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- QNX6/7
- EtherCAT

EtherCAT Master Stack Operating system: VxWorks 6.x CPU architecture: PowerPC Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- VxWorks
- EtherCAT
EtherCAT Master Stack Operating system: VxWorks 6.x CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- VxWorks
- EtherCAT

EtherCAT Master Stack Operating system: VxWorks 5.x CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- VxWorks
- EtherCAT
EtherCAT Master Stack Operating system: VxWorks 5.x CPU architecture: PowerPC Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- VxWorks
- EtherCAT

EtherCAT Master Stack Operating system: RTX 2009, 2011, 2012 CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- RTX
- EtherCAT
Operating system: RTX 8.x, CPU architecture: x86, Delivery as object code, Runtime license for one seat/device
- Runtime license
- Software Stack
- RTX
- EtherCAT
EtherCAT Master Stack Operating system: RTX64 2013 (64 Bit) CPU architecture: x86 Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- RTX64
- EtherCAT

EtherCAT Master Stack Operating system: OS9 5.2 CPU architecture: PowerPC Delivery as object code Runtime license for one seat/device
- Runtime license
- Software Stack
- OS-9
- EtherCAT
Operating system: FreeRTOS, CPU architecture: ZYNC 7000, Delivery as object code, Runtime license for one seat/device
- Runtime license
- Software Stack
- FreeRTOS
- EtherCAT
includes: 10x EtherCAT Master runtime lizenses 1x EtherCAT Workbench 12x month Support und update service Please indicate your operation system, version and target architecture This bundle can be extended with additional project lizenses
- Software Bundle
- Linux
- OS-9
- QNX6/7
- RTX
- RTX64
- VxWorks
- Windows 7/8/10/11
- EtherCAT

Support and updates for 12 month from DD.MM.JJJJ to DD.MM.JJJJ. for P.4503.01 EtherCAT-Master-Project-Bundle
- Support & Maintenance Contract
- Linux
- OS-9
- QNX6/7
- RTX
- RTX64
- VxWorks
- Windows 7/8/10/11
- EtherCAT