Features
-
Full CAN controller by integrated firmware for any identifier
-
Each channel with separate microcontroller and its own CAN controller
-
Loss less data exchange with VMEbus via Shared RAM and FIFOs
-
Microcontroller: 4x MOTOROLA 68331, 20MHz
-
4x 256 kbytes SRAM
-
4x controller: SJA1000 - CAN2.0A, ISO 11898-1
-
CAN interfaces electrically isolated and designed acc. to ISO 11898-2
-
Bit rate up to 1 Mbit/s
-
Shared RAM: 512 kbytes, optionally 2 Mbytes, organization: 32 bits data width
-
VMEbus compatibility: IEEE 1014 rev. D
-
VMEbus access: A32, A24: D8, D16, D32, ADO, UAT, RMW
Free drivers for Windows and Linux included
The product is offered with drivers for Windows and Linux, which can be downloaded free of charge.
In addition to these operating systems, various other (real-time) operating systems are also supported. Detailed information can be found in the description of our order items and, if applicable, in the accessories at the bottom of this page. For more detailed information about the availability of drivers for your operating system, please contact our sales team.
High Integration
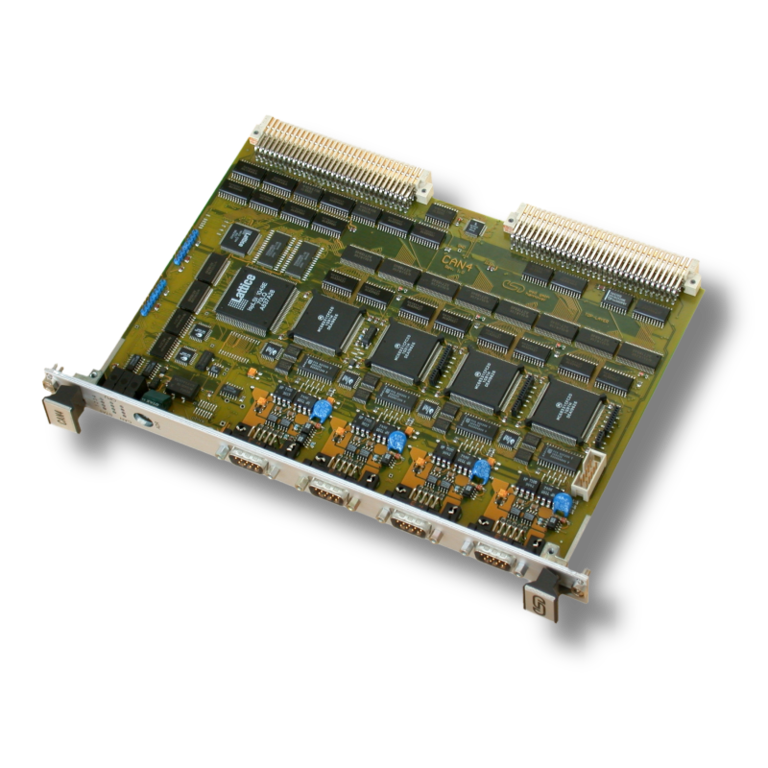
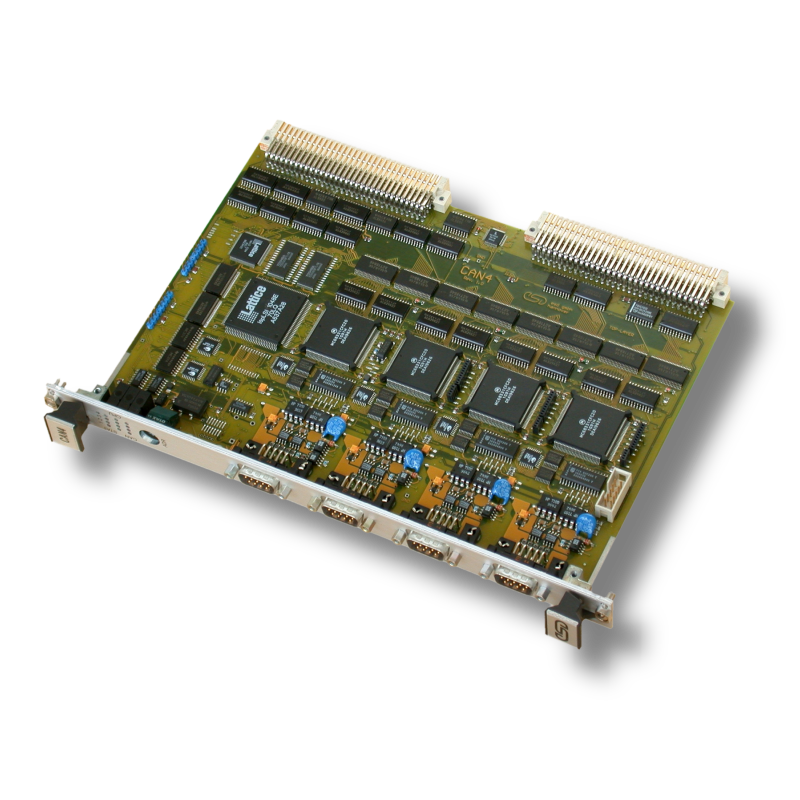
The VME-CAN4 includes on a VMEbus 6U board 4 complete, independent CAN interfaces to the VMEbus and needs one slot.
Intelligent Control
Each interface is equipped with its own micro controller of type 68331 at 20 MHz clock frequency. Each micro controller has a working memory of 256 kbytes available.
After a RESET, the micro controller program code is loaded from the local Flash EPROM. Program updates can be loaded into the Flash EPROM via the VMEbus.
The CAN data transfer from and to the VMEbus is performed via a Shared RAM with a capacity of 512 kbytes and FIFOs. Received Rx data generates a local interrupt, which will be processed by the belonging micro controller. It stores the data in the Shared RAM and the identifier is stored in the FIFO (FIFO to master).Then it generates a VMEbus interrupt. For each of the four CAN channels an individual interrupt vector is generated.
To transmit CAN data, the VMEbus master enters the data into the Shared RAM. With this, automatically a pointer to the identifier is stored in the FIFO (FIFO to slave). The belonging micro controller reads FIFO and RAM and starts the data transmission.
High-Speed CAN Controller
The included CAN controller of type SJA1000 supports the standard CAN protocol (11 bits identifier) as well as the extended CAN protocol (29 bits identifier).
The physical CAN layer is according to ISO 11898 for a maximum baudrate of up to 1 Mbit/s. The baudrate can be programmed in the range of 10 kbits/s up to 1 Mbit/s via the VMEbus. The CAN channels are electrically isolated from each other as well as from the VME section. The local supply of the four channels is performed by four DC/DC converters. With electrical isolation as a standard, esd guarantees a transfer rate of 1 Mbit/s for a bus length of 37 m, if the other CAN partissipants are equipped with equivalent CAN interfaces.
Connection of the CAN nets is performed by 9-pole DSUB female connectors at the front panel. For other layers or connector standards a piggy-back interface is available.
LED Display
The state of the CAN controller and of the micro controllers of the particular channels, as well as the general board state are displayed by LEDs at the front panel.
Reliable CAN Protocol
The extremely error-tolerant CAN protocol (Hamming distance = 6) is outstandingly suitable for the construction of decentralized I/O nets, where a safe and manufacturerindependent communication protocol is necessary because of the variety of the applications. The CAN protocol includes a standardized transfer frame and a high transfer rate.
Decentralized Communication
An essential advantage of the CAN protocol is its capability of self-arbitration and its multi master capability. With this the user can interconnect in a CAN net various sensors, actuators, CAN I/O modules as well as VMEbus controllers, PCs, PLC modules or stand-alone controllers.
Software Support
The integrated firmware enables communication opportunities at OSI layer 2 or with higher layer CAN protocols. By means of the Shared RAM interface as well as the FIFO interface to the VMEbus section, a use of the board with various operating systems at layer 2 can easily be performed.
Drivers for VxWorks, LynxOS and Linux are available.
Basic functions, such as CAN monitoring or automatic interfacing of CAN nets are easy to parametrize.
The standardized higher layer protocols CAL/CMS and CANopen are already available as master or slave package for nearly all operating systems. Moreover, complete software packages for SDS master operation and for DeviceNet are available.
The firmware interface of the VME-CAN4 is compatible to the firmware of the VMECAN2.
Do you have special requirements regarding the product?
We are happy to provide you with a customer-specific option or adjustment to our products when purchasing appropiate quantities. Please contact our sales team for detailed information.

With the help of the button "Add to watchlist" you can save articles on your watchlist.
Afterwards, you can request your saved watch list as a quotation via a contact form.
Hardware
Intelligent VME to CAN interface board with 4 independent CAN 2.0A/2.0B channels according to ISO 11898, electrically isolated, transfer rates up to 1 Mbit/s, firmware integrated, NT-API
- galvanically isolated
- CANopen Manager
- VME
- Solaris
- VxWorks
- CAN-Layer 2
Intelligent VME to CAN interface board with 4 independent CAN 2.0A/2.0B channels according to ISO 11898, electrically isolated, transfer rates up to 1 Mbit/s, firmware integrated
- galvanically isolated
- CANopen Manager
- VME
- Solaris
- VxWorks
- CAN-Layer 2

Intelligent VME to CAN interface board with 2 independent CAN 2.0A/2.0B channels according to ISO 11898, electrically isolated; transfer rates up to 1 Mbit/s; firmware integrated
- galvanically isolated
- CANopen Manager
- VME
- Solaris
- VxWorks
- CAN-Layer 2

