Features
-
Vollwertiger CAN-Controller mit integrierter Firmware für jede Erkennung
-
Jeder Kanal mit separatem Mikrocontroller und eigenem CAN-Controller
-
Verlustfreier Datenaustausch über den VMEbus durch Shared RAM und FIFOs
-
Mikrocontroller: 4x MOTOROLA 68331, 20MHz
-
4x 256 kBytes SRAM
-
4x Controller: SJA1000 - CAN2.0A, gemäß ISO 11898-1
-
CAN-Interfaces gemäß ISO 11898-2, galvanisch getrennt
-
Bitrate bis zu 1 Mbit/s
-
Shared RAM: 512 kBytes, optional 2 MBytes, Organisation: 32 Bits Datenbreite
-
VMEbus Kompatibilität gemäß IEEE 1014 rev. D
-
VMEbus Zugriff: A32, A24: D8, D16, D32, ADO, UAT, RMW
Kostenfreie Treiber für Windows und Linux im Lieferumfang
Das Produkt wird mit Treibern für Windows und Linux angeboten, die kostenlos heruntergeladen werden können.
Neben diesen Betriebssystemen werden auch verschiedene andere (Echtzeit-)Betriebssysteme unterstützt. Detaillierte Informationen finden Sie in der Beschreibung unserer Bestellartikel und ggf. im Zubehör am Ende dieser Seite. Für genauere Informationen zur Verfügbarkeit von Treibern für Ihr Betriebssystem steht Ihnen unser Sales-Team gerne zur Verfügung.
Hohe Integration
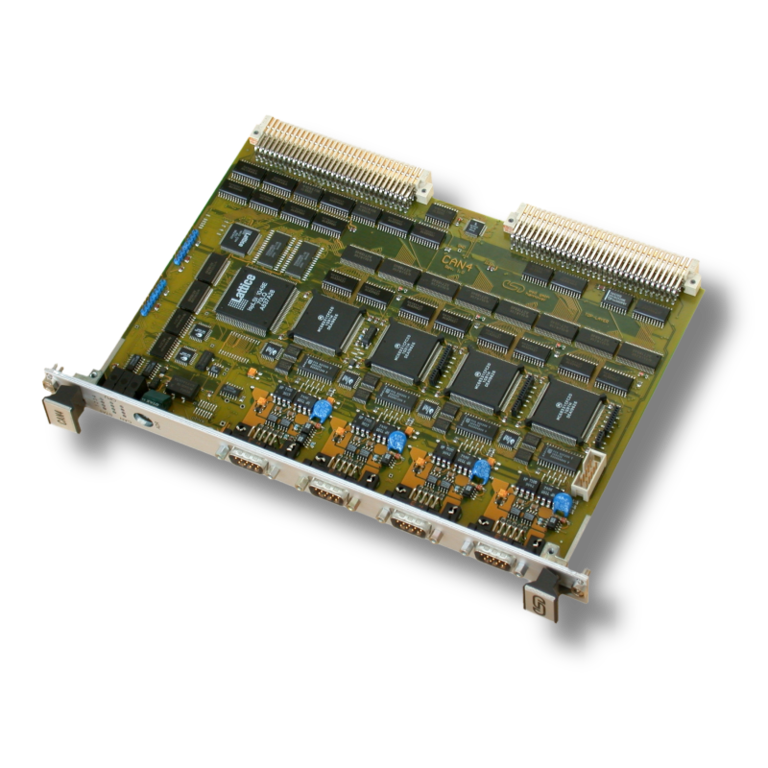
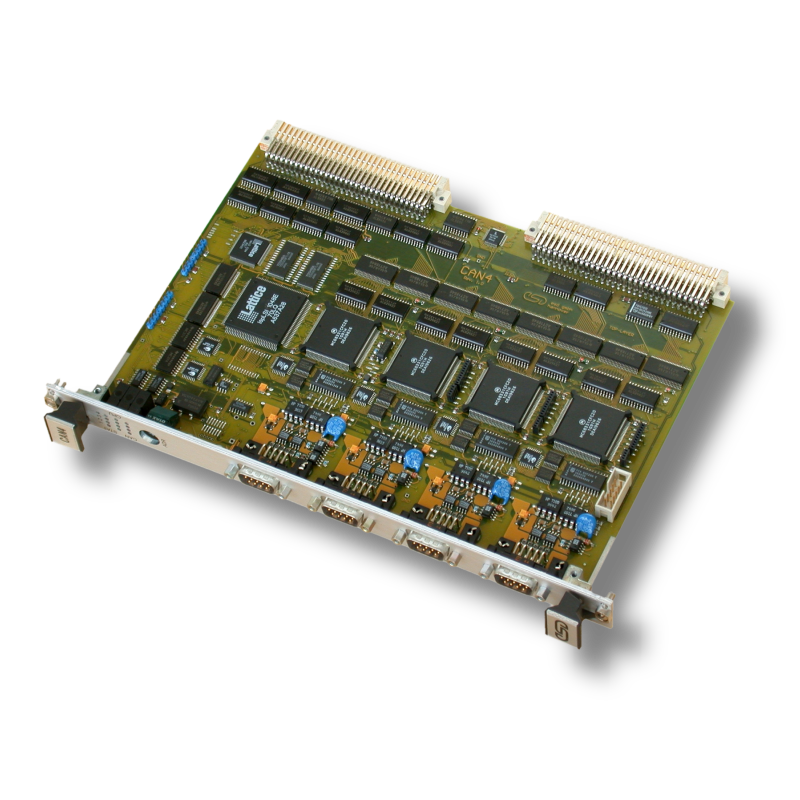
Die VME-CAN4 Karte beinhaltet auf einer VMEbus 6HE-Karte 4 komplette, unabhängige CAN-Schnittstellen zum VMEbus und benötigt einen Steckplatz.
Intelligente Steuerung
Jede Schnittstelle ist mit einem eigenen Mikrocontroller vom Typ 68331 mit 20 MHz Taktfrequenz ausgestattet. Jeder Mikrocontroller hat einen Arbeitsspeicher von 256 kByte zur Verfügung.
Nach einem RESET wird der Programmcode des Mikrocontrollers aus dem lokalen Flash-EPROM geladen. Programm-Updates können über den VMEbus in das Flash-EPROM geladen werden.
Der CAN-Datentransfer vom und zum VMEbus erfolgt über ein Shared RAM mit einer Kapazität von 512 kByte und FIFOs. Empfangene Rx-Daten erzeugen einen lokalen Interrupt, der von dem zugehörigen Mikrocontroller verarbeitet wird. Dieser speichert die Daten im Shared RAM und den Identifier im FIFO (FIFO to Master) und generiert dann einen VMEbus-Interrupt. Für jeden der vier CAN-Kanäle wird ein eigener Interrupt-Vektor erzeugt.
Um CAN-Daten zu übertragen, trägt der VMEbus-Master die Daten in das Shared RAM ein. Dabei wird automatisch ein Zeiger auf den Identifier im FIFO (FIFO to Slave) abgelegt. Der zugehörige Mikrocontroller liest FIFO und RAM aus und startet die Datenübertragung.
High-Speed CAN Controller
Der mitgelieferte CAN-Controller vom Typ SJA1000 unterstützt sowohl das Standard-CAN-Protokoll (11 Bit Identifier) als auch das erweiterte CAN-Protokoll (29 Bit Identifier).
Die physikalische CAN-Schicht entspricht der ISO 11898 für eine maximale Baudrate von bis zu 1 Mbit/s. Die Baudrate kann im Bereich von 10 kbits/s bis 1 Mbit/s über den VMEbus programmiert werden. Die CAN-Kanäle sind sowohl untereinander als auch gegenüber dem VME-Teil galvanisch getrennt. Die lokale Versorgung der vier Kanäle erfolgt über vier DC/DC-Wandler. Mit der galvanischen Trennung als Standard garantiert esd eine Übertragungsrate von 1 Mbit/s bei einer Buslänge von 37 m, wenn die anderen CAN-Teilnehmer mit gleichwertigen CAN-Schnittstellen ausgestattet sind.
Der Anschluss der CAN-Netze erfolgt über 9-polige DSUB-Buchsen an der Frontplatte. Für andere Layer oder Steckerstandards ist eine Huckepack-Schnittstelle verfügbar.
LED Display
Der Zustand des CAN-Controllers und der Mikrocontroller der einzelnen Kanäle sowie der allgemeine Zustand der Karte werden über LEDs an der Frontplatte angezeigt.
Zuverlässiges CAN-Protokoll
Das extrem fehlertolerante CAN-Protokoll (Hamming-Distanz = 6) eignet sich hervorragend für den Aufbau dezentraler I/O-Netze, wo aufgrund der Vielfalt der Anwendungen ein sicheres und herstellerunabhängiges Kommunikationsprotokoll erforderlich ist. Das CAN-Protokoll beinhaltet einen standardisierten Übertragungsrahmen und eine hohe Übertragungsrate.
Dezentralisierte Kommunikation
Ein wesentlicher Vorteil des CAN-Protokolls ist seine Fähigkeit zur Selbstarbitrage und seine Multi-Master-Fähigkeit. Damit kann der Anwender in einem CAN-Netz verschiedene Sensoren, Aktoren, CAN-I/O-Module sowie VMEbus-Steuerungen, PCs, SPS-Module oder Stand-alone-Steuerungen miteinander verbinden.
Software Support
Die integrierte Firmware ermöglicht Kommunikationsmöglichkeiten auf OSI-Schicht 2 oder mit höherschichtigen CAN-Protokollen. Durch das Shared-RAM-Interface sowie das FIFO-Interface zum VMEbus-Teil ist ein Einsatz der Karte mit verschiedenen Betriebssystemen auf Layer 2 problemlos möglich.
Es sind Treiber für VxWorks, LynxOS und Linux verfügbar.
Grundlegende Funktionen, wie z.B. die CAN-Überwachung oder die automatische Ankopplung von CAN-Netzen sind einfach zu parametrieren.
Die standardisierten höheren Schichtprotokolle CAL/CMS und CANopen sind bereits als Master- oder Slave-Paket für fast alle Betriebssysteme verfügbar. Darüber hinaus sind komplette Softwarepakete für den SDS-Masterbetrieb und für DeviceNet verfügbar.
Die Firmware-Schnittstelle des VME-CAN4 ist kompatibel zur Firmware des VMECAN2.
Sie haben besondere Anforderungen an das Produkt?
Wir ermöglichen Ihnen gerne kundenspezifische Optionen und Anpassungen unserer Produkte bei Abnahme einer geeigneten Menge. Bitte kontaktieren Sie unser Sales-Team für weiterführende Informationen.

Mit Hilfe des Button "Auf die Merkliste" können Sie Artikel auf Ihrer Merkliste speichern.
Ihre gespeicherte Merkliste können Sie anschließend über ein Formular als Angebot anfordern.
Hardware
Intelligentes VMEbus-Board (A32/D32) mit 4 unabhängigen CAN 2.0A/2.0B- Schnittstellen nach ISO 11898, galvanisch getrennt; Datenrate bis zu 1 MBit/s; integrierte Firmware; NT-API
- Galvanisch getrennt
- CANopen Manager
- VME
- Solaris
- VxWorks
- CAN-Layer 2
Intelligentes VMEbus-Board (A32/D32) mit 4 unabhängigen CAN 2.0A/2.0B- Schnittstellen nach ISO 11898, galvanisch getrennt; Datenrate bis zu 1 MBit/s; integrierte Firmware
- Galvanisch getrennt
- CANopen Manager
- VME
- Solaris
- VxWorks
- CAN-Layer 2

Intelligentes VMEbus-Board (A32/D32) mit 2 unabhängigen CAN 2.0A/2.0B- Schnittstellen nach ISO 11898, galvanisch getrennt; Datenrate bis zu 1 MBit/s; integrierte Firmware
- Galvanisch getrennt
- CANopen Manager
- VME
- Solaris
- VxWorks
- CAN-Layer 2

